Quo
vadis
Neue
Bilder

|
Neues
Video1

|
Alte
Bilder
|
Neues
Video2

|
Inzwischen hab ich der Platine und dem
Akku ein großes Gehäuse von Ferrero spendiert.
Außerdem hab ich den Spannungsregler 7805 gegen einen LM2940
ausgetauscht.
Dadurch brauch ich für den AVR keine extra Batterie mehr, sondern
kann ihn aus den fünf NiMh Zellen mitversorgen.
Die Schalter sind jetzt in das Gehäuse eingebaut und haben ein
chickes Schild aus Alucorex bekommen.
Dieses Fotolack beschichtete Alu ist echt ein geiles Zeug. Schade nur,
daß Reichelt es nur in Tafeln ab 500x500 verkauft.

Die
Software ist komplett in Assembler geschrieben. Für die
Servoansteuerung ist das optimal. Allerdings ist das Programm
inzwischen so groß und unübersichtlich geworden, dass ich
einen neuen Sechsbeiner sicher in C programmieren werde und nur die
Servoroutine im Timerinterupt alle 20ms kriegt ein "Include" in
Assembler.
Auch eine vernünftige, intelligente Sensorauswertung wird in C
machbar.
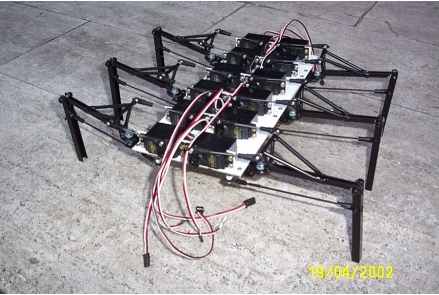
Der
Roboter kann jetzt durch die Gegend laufen, meistens ohne irgendwo zu
kollidieren. Außerdem kann ich zwischen dem bekannten -ich nenne
es mal Dreipunkt und Einzelschritt- umschalten. Letzteres ist
allerdings noch verbesserungsbedürftig, wie man im 2. Video sieht.
Eine wichtige Verbesserung sind auch die stabileren Gelenke.
Ich hab dabei diesmal auf eine Lackierung verzichtet, damit man mir
auch glaubt, daß die weich gelötet sind ;-).
Nächstes Ziel sind Taster an den Beinen, die dem Controller sagen,
wann ein Bein aufsetzt. Damit soll der Roboter geländegängig
werden.
Außerdem will ich ein Display anschließen, um Einstellungen
direkt ändern zu können. Dafür hab ich leider nicht mehr
genug Pins am AVR frei. Es wird daher ein zusätzlicher uC, oder
einer mit mehr Pins fällig.
Alles
Weitere kommt dann demnächst
Zurück